Evidencias
Seleccione para ver.
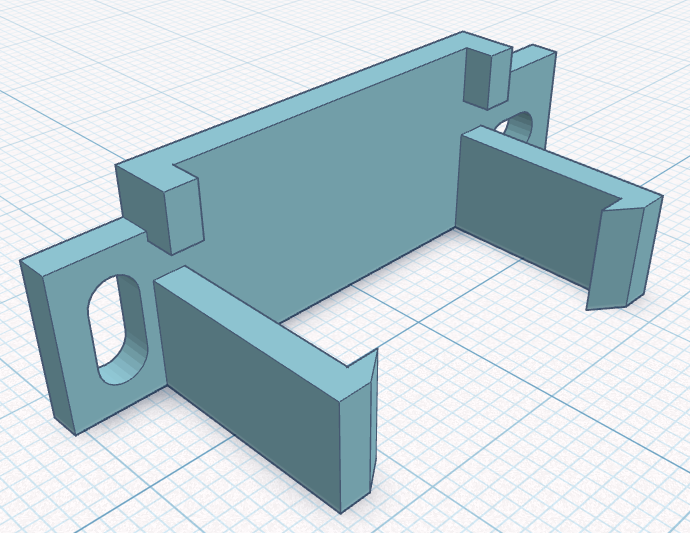
El componente modelado corresponde a un soporte para servomotor tipo SG90, diseñado para fijar y posicionar el actuador dentro del sistema de clasificación. Presenta dimensiones aproximadas de 60 mm de largo, 40 mm de ancho y 25 mm de altura, adaptadas a las dimensiones del servomotor y al montaje en la estructura. Su función principal es proporcionar estabilidad durante el accionamiento del mecanismo de desvío de tapitas. El diseño incluye orificios de montaje compatibles con el SG90 y con la base del sistema, facilitando su ensamblaje mediante tornillos. Se optó por una geometría resistente y ligera, adecuada para fabricación mediante impresión 3D. Además, se consideraron tolerancias para asegurar un ajuste firme y preciso del servomotor dentro del soporte.
[Placeholder — Describe el componente modelado, sus dimensiones aproximadas, función dentro del sistema y decisiones de diseño tomadas.]
[Placeholder — Describe el componente modelado, sus dimensiones aproximadas, función dentro del sistema y decisiones de diseño tomadas.]
[Placeholder — Describe el componente modelado, sus dimensiones aproximadas, función dentro del sistema y decisiones de diseño tomadas.]
[Placeholder — Describe el componente modelado, sus dimensiones aproximadas, función dentro del sistema y decisiones de diseño tomadas.]